Robot sérvsebészet

A sebész irányít
A sebész a konzolból irányítja a robot karokban lévő rendkívül finom hajlítható eszközöket.
Precizitás
A sebész minden apró kézmozdulatát a daVinci rendszer tökéletesen leköveti.
Tökéletes látás
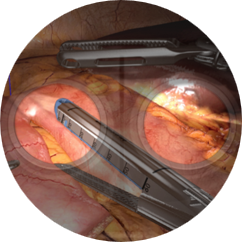
Akár tízszeresen nagyított, 3 dimenziós kép a műtéti területről. A sebész tisztábban látja az anatómiát, mint valaha szabad szemmel lehetséges lenne.

Mozgékonyság
Az apró, csuklós eszközök jobban hajlíthatóak és precízebbek, mint az emberi kéz.
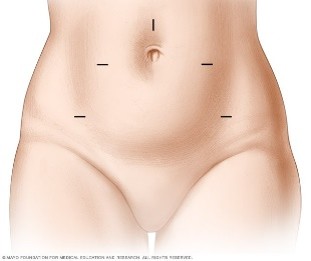
Apró metszések (8 mm)
Idegkímélet, alacsonyabb krónikus fájdalom. Gyorsabb visszatérés a mindennapos életbe.
A da Vinci rendszer legfőbb előnyei sérv műtéteknél
Rövidebb kórházi tartózkodás
Kevesebb fájdalom
Alacsonyabb sebgyógyulási és sebfertőzési szövődmények
Alacsonyabb sérv kiújulási arány
Precízebb műtéti preparáció és háló behelyezés
Szövetrögzítő kapcsok elkerülése
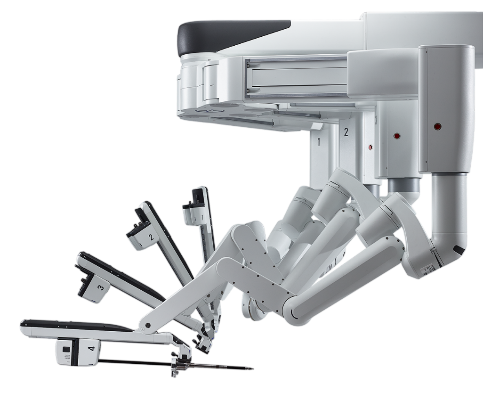
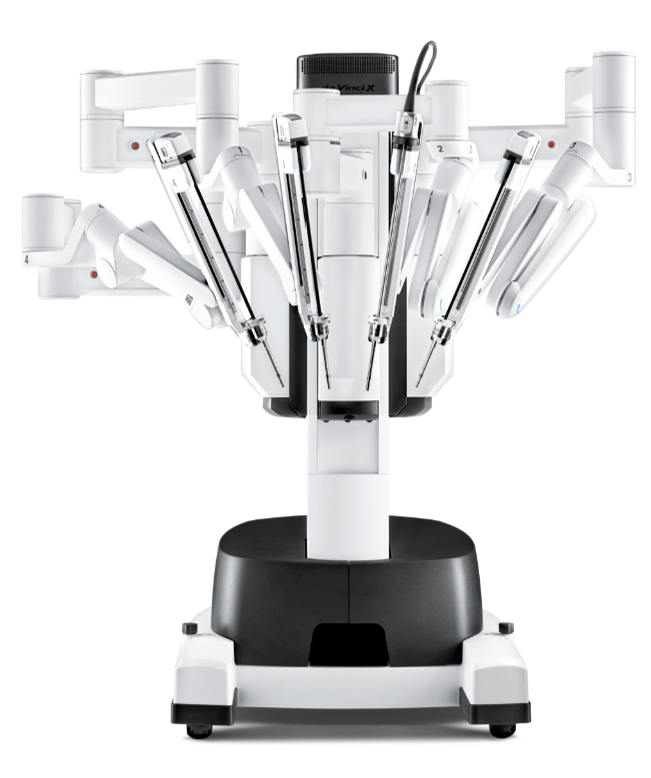
da Vinci robot - rendszer bemutatása

A sebész a konzolnál ülve nagyított 3D-s nézetben operál és a konzolkarok segítségével irányítja az eszközöket, melyeknek precizitása és mozgástartománya jelentősen jobb az emberi kéznél.
A robotkarokon irányított műszerek valós időben lekövetik a sebész kézmozdulatait az operált területen.
Hogyan zajlik a robotasszisztált sérvműtét?
A beavatkozás során néhány apró metszésen keresztül juttatjuk be a műszereket a hasüregbe, azonban a műtétet nem közvetlenül kézzel, hanem egy sebész által irányított robotrendszer segítségével végezzük.
A sebész egy konzolnál ülve, nagy felbontású, háromdimenziós képen keresztül irányítja a robotkarokat, amelyek rendkívül finom, precíz, csuklós mozgásra képes műszerekkel dolgoznak. Ez a technológia jelentősen meghaladja a hagyományos laparoszkópia technikai lehetőségeit, különösen összetettebb, nagyobb vagy nehezebben hozzáférhető sérvek esetén.

A robotkarok és az eszközök megfelelő elhelyezését, illetve az eszközöknek a műtéti területre történő bevezetését jelenti. Ez a folyamat kb. 10-15 percet vesz igénybe.
Rendkívül sok fajta műtéti eljárás áll rendelkezésre, melyet a sérv típusa alapján tervezünk meg, korábbi fizikai vizsgálat és CT képek alapján. Általánosságban elmondható, hogy első lépésben a robotasszisztált technika segítségével az előtüremkedett szöveteket visszahelyezzük a hasüregbe, majd a hasfali defektust - méretétől és típusától függően - feszülésmentesen zárjuk.
Miután megtörtént a defektus zárása, speciális sérvhálót ültetünk be a hasfal megfelelő rétegébe, amely megerősíti a hasfalat és csökkenti a kiújulás esélyét. A robotsebészet egyik legnagyobb előnye, hogy lehetővé teszi a háló helyének precíz és könnyed kialakítását.
Háló elhelyezésnél a legfontosabb szempont hogy ez a hasfal megfelelő rétegei közé kerüljön. A hashártyán kívüli elhelyezés a legelőnyösebb, ami hosszú távon kedvezőbb eredményeket biztosít. Mivel a háló a hasüregen kívül helyezkedik el, így nem kerül közvetlen kontaktusba a belekkel – így elkerülhetőek a különböző bélsérülések, összenövések és bélelzáródásos komplikációk. Ezen kívül a megfelelően elhelyezett háló a sérv kiújulásának arányát is jelentősen csökkenti.
Felépülés a robotasszisztált sérvműtét után
A felépülési idő a sérv típusától és méretétől, a beteg általános állapotától, a műtét komplexitásától függ. Általánosságban elmondható, hogy a betegek többsége 1–2 napon belül otthonába távozhat. Az első 2-3 hétben fizikai kímélet javasolt, kerülni kell a nehéz fizikai munkát és az 5 kg feletti súlyok emelését, illetve a megterhelő sportokat.
A mindennapi tevékenységekhez szükséges mozgás, séták már közvetlenül a műtét után megkezdhetők, majd 2 hét elteltével a terhelés fokozatosan növelhető. Teljes terheléshez kb. 4-6 hét elteltével lehet visszatérni.
A szövődmények előfordulása ritka, többségük konzervatív módon kezelhető, újabb műtétre csak kivételes esetben van szükség.






